
Avance histórico: Científicos crean robots autónomos más pequeños que un grano de sal, capaces de procesar información y moverse sin ayuda externa.
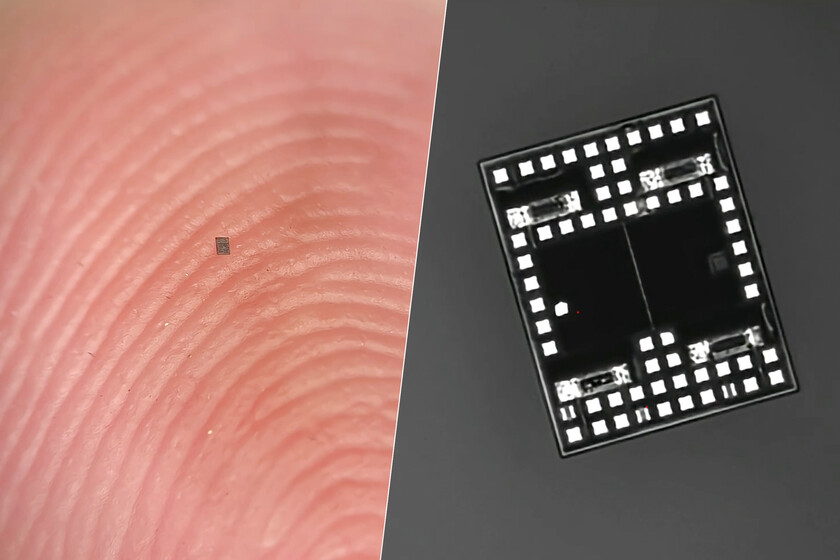
La robótica ha superado un límite físico considerado infranqueable: construir máquinas autónomas a escala microscópica sin sacrificar su capacidad de decisión. Un equipo de la Universidad de Pensilvania y la Universidad de Michigan ha desarrollado el robot programable autónomo más pequeño hasta la fecha, con dimensiones de 210 x 340 micrómetros y un grosor de 50 micrómetros. Para ponerlo en perspectiva, podría posarse sobre la cresta de una huella dactilar y resultaría casi invisible al ojo humano.
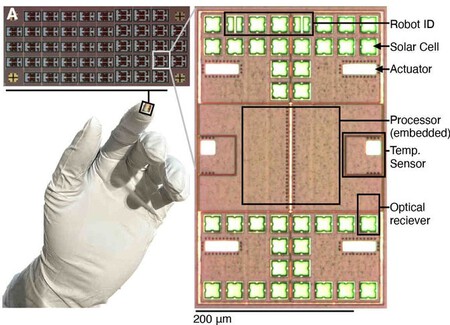
Tecnología integrada en miniatura: Este microrrobot no solo reduce su tamaño, sino que incorpora en una sola plataforma sistemas de computación, memoria, sensores, comunicación y locomoción. A diferencia de prototipos anteriores, que dependían de equipos externos para procesar datos, este dispositivo ejecuta algoritmos y ajusta su comportamiento en tiempo real según su entorno.
El mayor desafío no fue conceptual, sino físico. A escalas micrométricas, las leyes de la física se transforman: la gravedad y la inercia pierden relevancia, mientras que fuerzas como la viscosidad y el arrastre dominan el movimiento. Desplazarse en un fluido se asemeja más a avanzar a través de un material espeso que a nadar. Además, el consumo energético —limitado a 100 nanovatios— hacía casi imposible combinar propulsión y computación en un mismo dispositivo.
Electrónica ultraeficiente: sobrevivir con casi cero energía
La solución requirió rediseñar la arquitectura electrónica desde cero. Los investigadores utilizaron un proceso CMOS de 55 nanómetros y lógica digital en régimen subumbral para mantener el consumo dentro del presupuesto energético. El robot integra:
- Células fotovoltaicas para alimentación.
- Sensores de temperatura.
- Circuitos de control para actuadores.
- Un receptor óptico para programación y comunicación.
- Un procesador con memoria.
La locomoción es otro aspecto revolucionario. En lugar de motores o partes móviles, el robot genera campos eléctricos que inducen corrientes en el fluido circundante, creando su propio






